Get Started midas Civil
Get Started midas Civil
 Featured blog of this week
Featured blog of this week

1. The usual method for calculating inertial force
For curved and skew bridges, when the overall coordinate system (Global Coordinate System) and the diagonals/orthogonals of the piers are not parallel in the analysis, users need to consider the seismic inertial forces in the horizontal direction acting on the entire pier in the "most unfavorable direction.”
Therefore, in practical applications, for each pier, the out-of-plane/in-plane directions are determined as the inertial force direction. The final load direction is then chosen as the "most unfavorable result," and the corresponding results are adopted for review.
In this case, as the inertial force direction needs to be considered for each pier, the number of load cases and the corresponding load review cases must be generated accordingly.
2. Here's an easier way to input the inertial force of curved bridges
|
💡 Highlights
|
The current program defines the load application direction in the Global Coordinate System, causing the inconvenience of manually calculating and inputting inertial forces for each pier in curved bridges.
This plugin has been developed to simplify the application of inertial forces for curved bridges by allowing users to input the direction rotated by a specific angle concerning the horizontal direction along the Z-axis of the global coordinate system when the inertial force direction does not align with the global coordinate system for the entire pier.
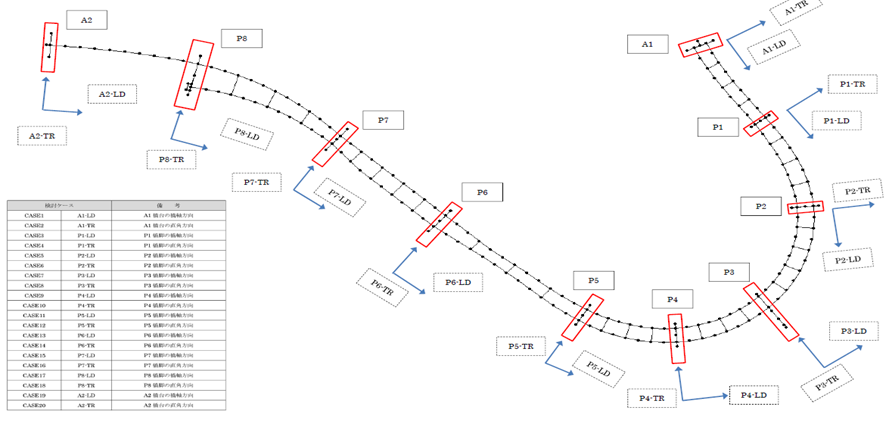
Figure1. Review direction for the application of inertial forces in curved bridges
3. Plugin manual for the Inertial Forces Controller
This part will explain the operating steps and each component in detail.
1. Open MIDAS CIVIL NX → Connect API → Open Plug-in Marketplace → Run Inertial Forces Controller Plugin
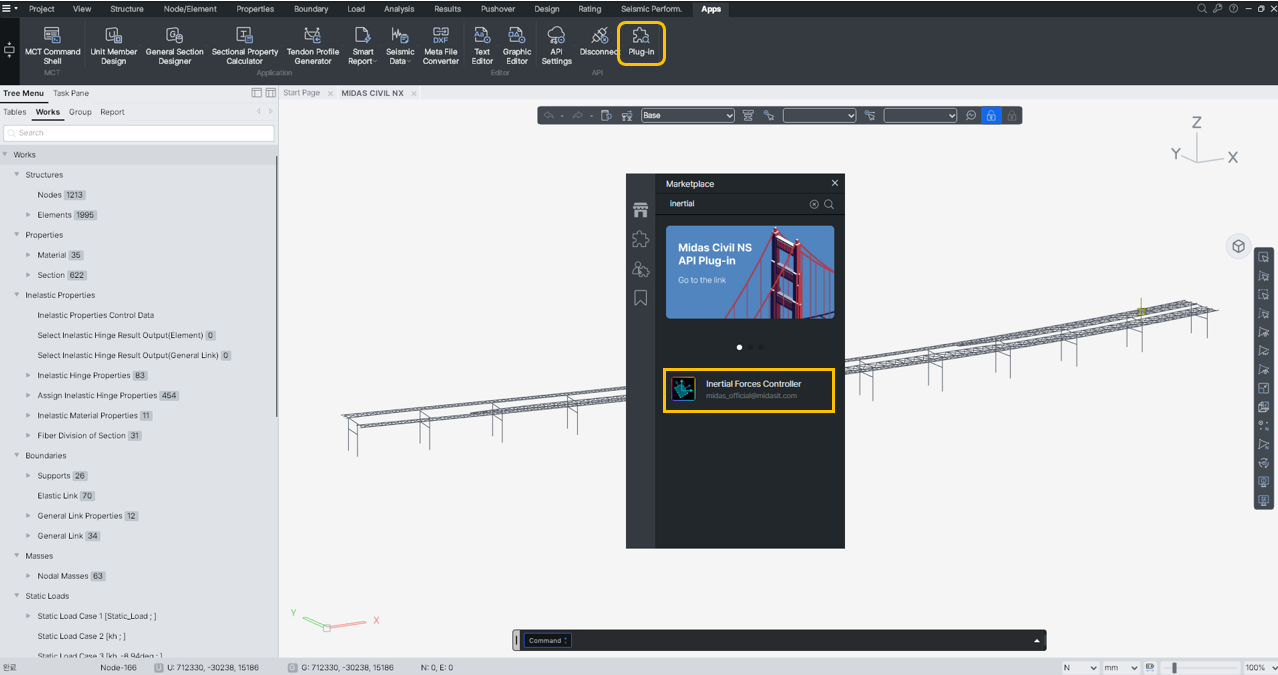
Figure2. Inertial Forces Controller Plugin Screenshot
2. When users operate the Inertial Forces Controller plug-in, they can add this plug-in to the users’ bookmark(1). The user can read plug-in information(2) and start by clicking the Run(3) button.
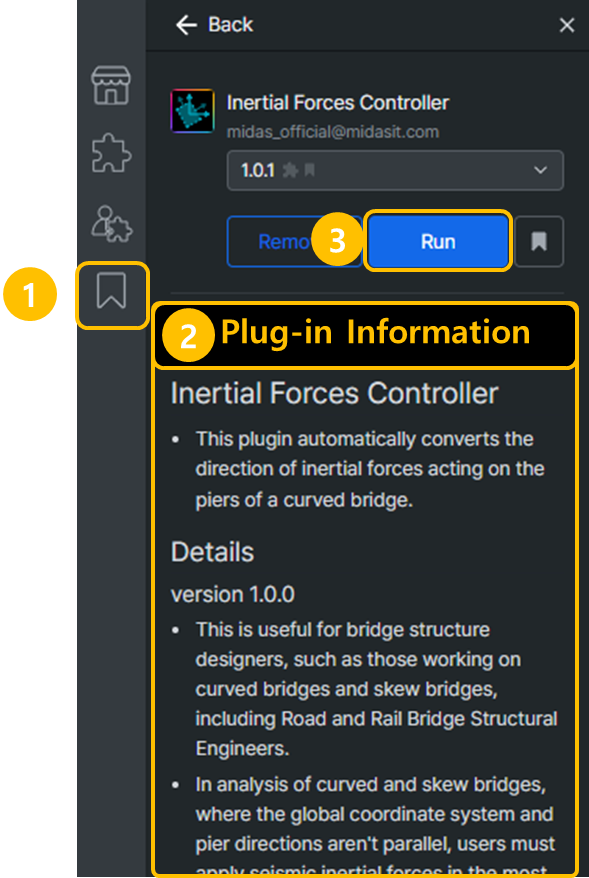 Figure3. Inertial Forces Controller Plugin
Figure3. Inertial Forces Controller Plugin
3. A new pop-up window will appear as this image. The user can show lists from Time History Load Cases, Static Load from Static Load Cases, and from Time History Functions(3)
(1) In these lists, time history load cases for products with the Analysis Method set to "Static" type are displayed.
(2) The static loads as shown are limited to cases where "Nodal Body Force" and "Nodal Loads" are assigned.
(3) The time history functions with the "Normal" type for the Time Forcing Functions Data configured in the product settings are displayed.
Additionally, it provides the following "Linear" function as default (Preset: Linear).
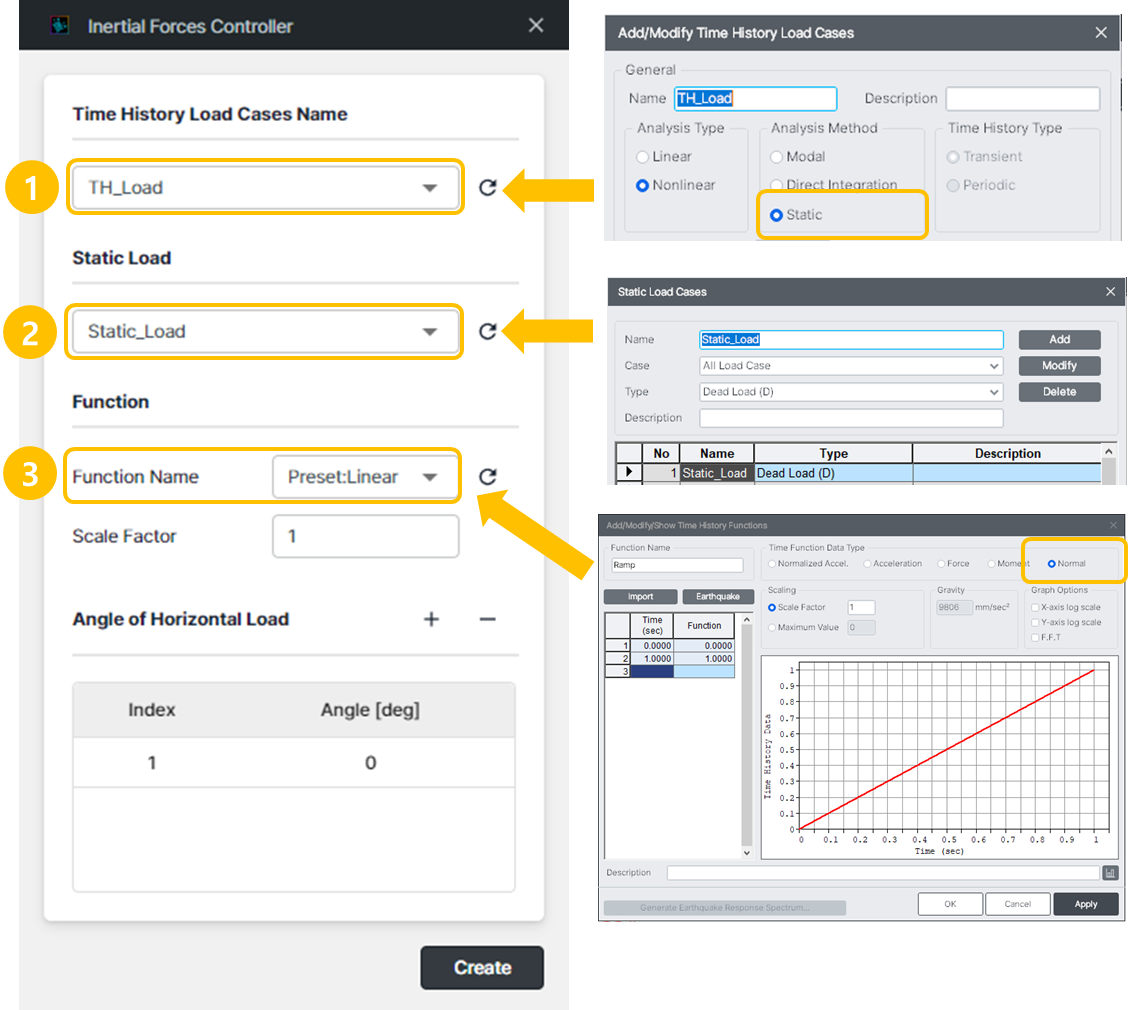
Figure4. Inertial Force Controller - Load Case Setting
4. After inputting the load case information, input the scaling factor(4) for the time load function and the angle of the horizontal load(6). This angle represents the rotation of the X-axis concerning the Z-axis of the global coordinate system, which is aligned with the direction of the horizontal component of ground acceleration. You can input a positive real number, and using the "+" button(5), users can define multiple rotation angles.
|
Be careful! (4)The scale factor should be larger than zero. and (6) angles cannot be defined as the same size. |
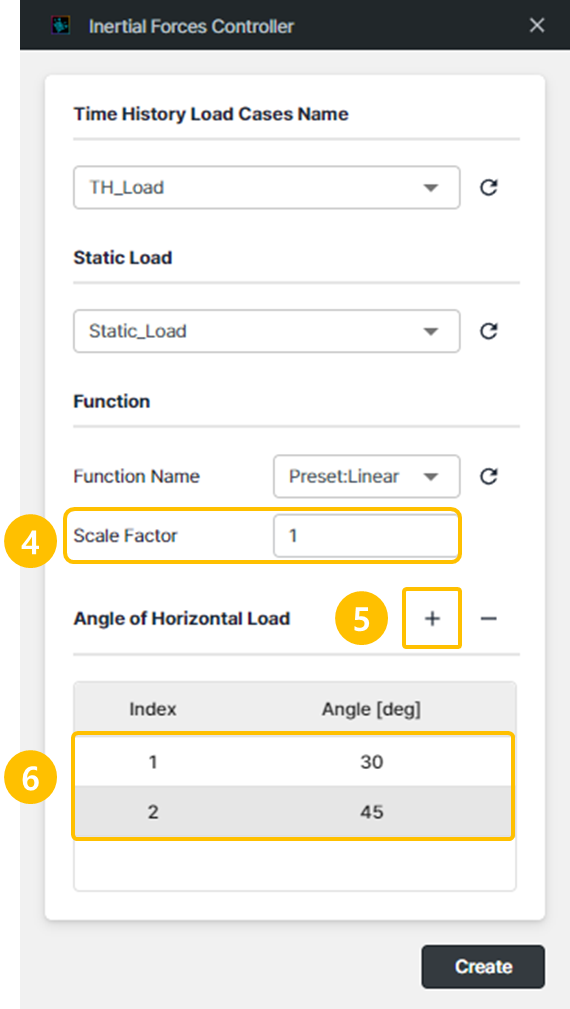
Figure5. Inertial Force Controller - Scale Factor/Angle Setting
5. After inputting previous information, press the Create button(7). Then, MIDAS CIVIL NX will newly create static load cases with added nodal body forces, time history load cases, time forcing functions, and time-varying static load as below.
The additional nodal body forces will be added in the form of "Static Load Name**_angle deg**," where the angle is in degrees, as configured in the "Static Load" setting.
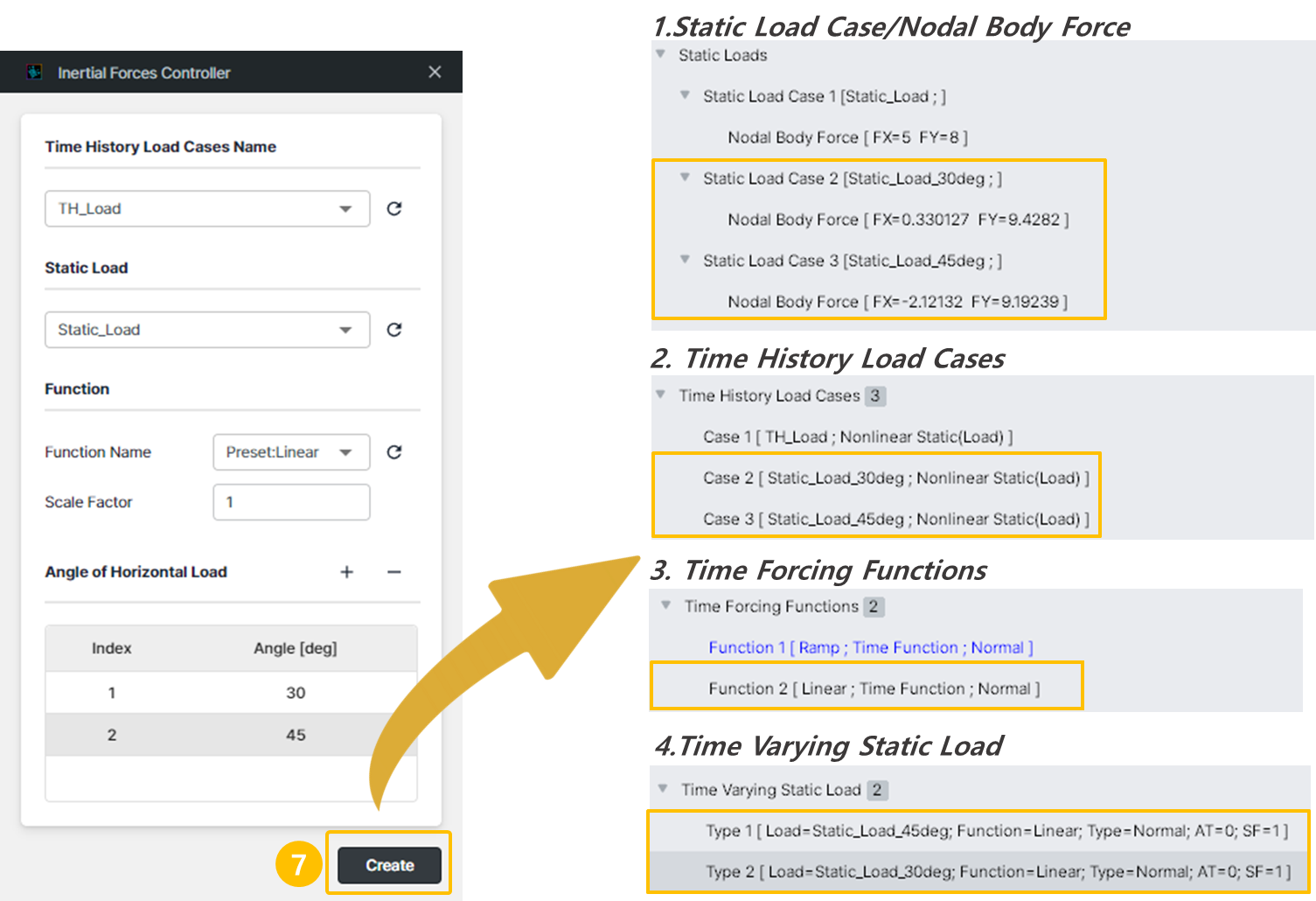
Figure6. Inertial Forces Controller Plugin - input information
The existing input nodal body forces loads are transformed according to the following procedure based on the angle of the load.
4. Coordinate-transformation Calculation
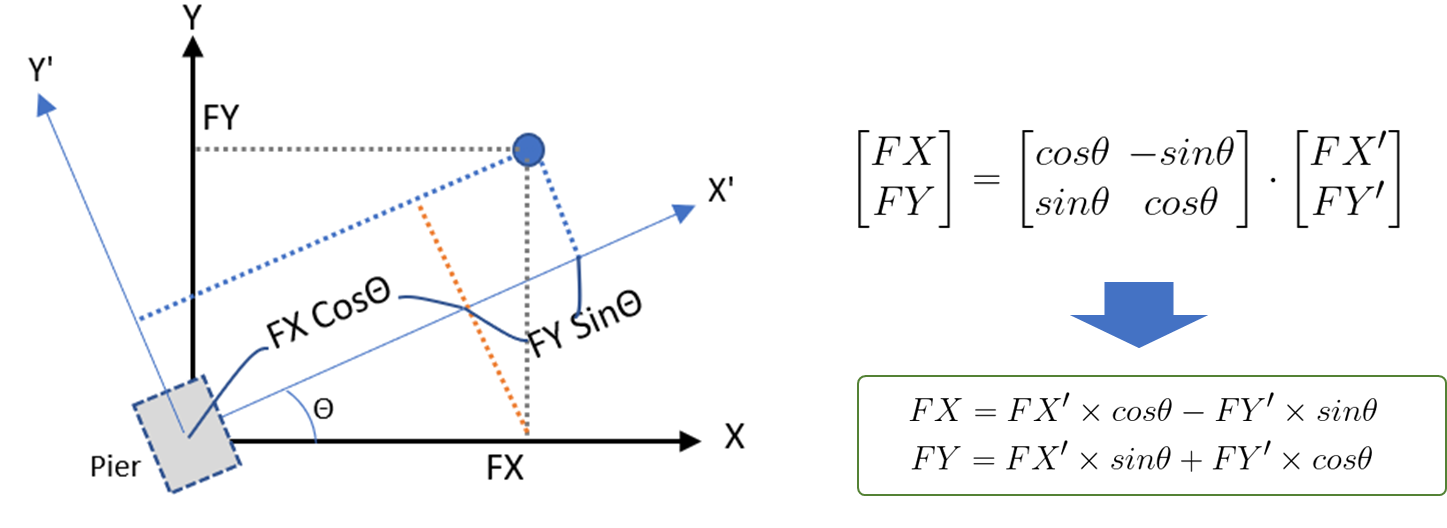
Figure7. Coordinate-transformation Calculation
For example, when generated in the 30-degree direction, it automatically creates a static load case that is coordinate-transformed from the original static load.
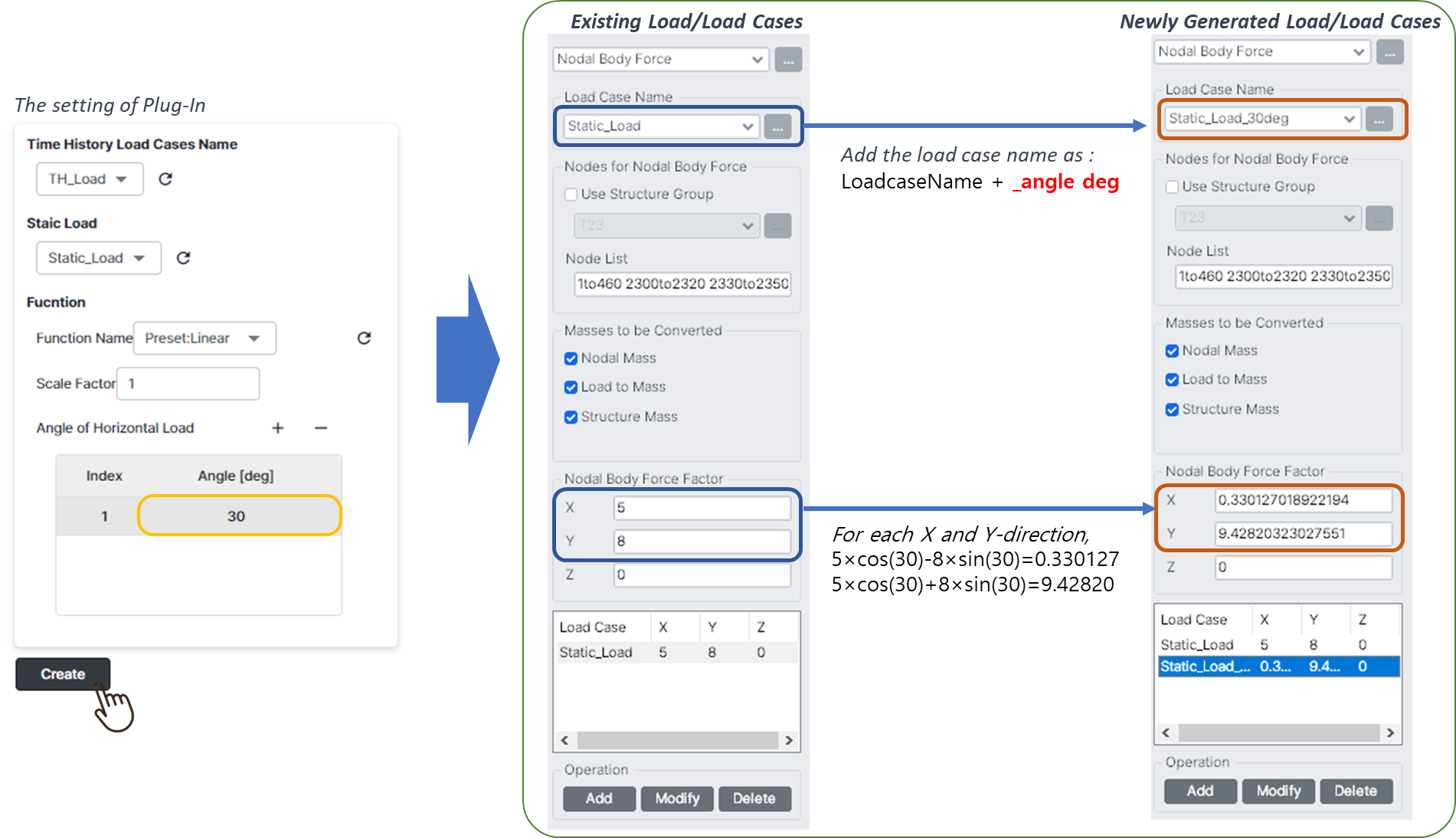
Figure8. The load is transformed into X and Y axes in the specified angle direction
5. Conclusion
The Inertial Forces Controller plugin automatically transforms the load direction of the inertia forces that need to be applied based on the number of braces, saving users time and eliminating potential human errors. Users only need to input the horizontal direction along the Z-axis of the global coordinate system to easily control inertia forces. Why don't you explore the benefits of using this plugin?
|
💡 Efficiently generate transformed inertial forces using the Inertial Forces Controller in MIDAS CIVIL NX! |
#CurvedBridge #SkewBridge #InertialForces